|
AUTOZINE TECHNICAL SCHOOL
4-Wheel Drive 4WD with Electronic (Active) torque split:
Porsche PSK - Porsche 959 (1987) Launched together with the mighty Porsche 959 supercar in 1987, Porsche-Steuer Kupplung (PSK) was probably the world's first electronic-controlled 4WD system. Incredibly, even after 30 years, it is still the most advanced 4WD system ever built. Most other 4WD systems have fixed torque split under normal driving condition (i.e. without tire slip). In contrast, the PSK was capable to vary torque split between 20:80 and 50:50 under normal condition. And this could be varied in fine steps. And this could be controlled by either the driver or the computer according to needs. When it was the computer, it constantly analysed g-force, throttle position, steering angle and even turbo boost to determine the right torque split so to optimize traction and acceleration. Nothing else was so versatile! 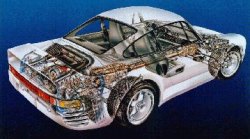 Although its construction diagram is no
longer available (seems that Porsche did not reveal to the public), we
can still understand it from the text descriptions gathered in various
books or magazines. The PSK did not have a conventional center
differential. Instead, it employed a multi-plate clutch to do the
torque split. This clutch had 6 pairs of frictional plates, each pair
was independently controlled by the computer and actuated by hydraulic
pressure thus they virtually equaled to 6 independent clutches. Although its construction diagram is no
longer available (seems that Porsche did not reveal to the public), we
can still understand it from the text descriptions gathered in various
books or magazines. The PSK did not have a conventional center
differential. Instead, it employed a multi-plate clutch to do the
torque split. This clutch had 6 pairs of frictional plates, each pair
was independently controlled by the computer and actuated by hydraulic
pressure thus they virtually equaled to 6 independent clutches. To make the system work, the front and rear drive shafts must run at different speeds. This was implemented by using special front tires whose diameter was 1% larger than the rear's. As there was a speed difference between the front and rear drive shafts, when applied hydraulic pressure to the first clutch, a small amount of torque transferred to the front axle. Lock up 2 clutches, 3 clutches... and the torque to front axle increased. When all 6 clutches were engaged, the drive shafts fully locked up, thus the torque split became 50:50. Normally, the torque split was default at 40:60 to match the 959's weight distribution. During hard acceleration, weight transfer would increase the traction at the rear tires while reduce traction at the front, so the PSK would adjust its torque split to 20:80 to make better use of traction. On slippery surfaces, even before tire slip occurred, it would adjust to 50:50 to optimize traction. When tire slip happened, as the PSK was able to fully lock up, most of the torque could be sent to the axle with more traction. What about power loss and wear due to the slipping clutches? As the speed difference was very small, Porsche said power loss was no greater than 0.4% of the power developed by the engine. As for wear, the clutch was dimensioned such that wear was negligible, thus it should last the life of the car. So why didn't Porsche continue to use it on other models? Because it was very expensive to build. When Porsche introduced 4WD to 911 Carrera 4, it opted for a so-called simplified version of PSK. Nissan ATTESA E-TS Pro - Nissan Skyline GT-R (1989) ATTESA E-TS, or Advanced Total Traction Engineering System for All-terrain Electronic Torque Split, might be a cumbersome name, but it gave the 1989 Skyline GT-R a very agile handling. In fact, without this clever 4WD system, the R32 GT-R would not have been the most fearsome touring car of its time. Like Porsche PSK, the Nissan design used an electronic-controlled multi-plate clutch to engage the front axle. But unlike the Porsche, its clutch plates were actuated by a single hydraulic circuit, so they could not be controlled individually. The simplicity translated to lower cost, smaller size and less weight. Further reduction was made possible as the clutch was not designed to work permanently. In normal driving the Skyline was purely rear-drive. In hard acceleration or cornering where more traction was needed, the clutch engaged to transfer torque to the front wheels. The timing and degree of engagement was controlled by computer after analysing parameters like g-force, boost pressure, throttle position and the speed of individual wheels measured by ABS sensors. The Skyline GT-R might lack the permanent variable torque split of Porsche 959, but in reality its handling left nothing to be desired, thanks in part to the extensive testing in Nurburgring track. Moreover, the part-time manner of its 4WD was not necessarily a bad thing from the view point of drivers, as it offered the agility and uncorrupted steering feel of RWD cars while delivering the cornering prowess of 4WD machines. In other words, it bridged the best of both worlds. In fact, Porsche 959 never earned the same regard for its handling. 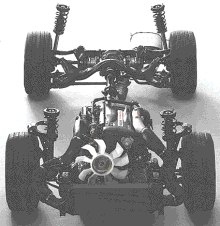 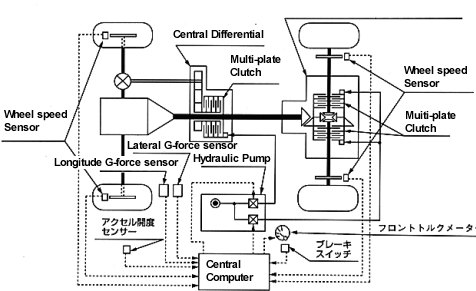 In the next generation, R33 Skyline GT-R, the system was upgraded to ATTESA E-TS Pro (pictured above). This time it added an active LSD to the rear axle to enable torque vectoring. The same design would continue in R34 and R35, although the latter switched to transaxle layout. Subaru DCCD - Subaru Impreza WRX STi (1994) Subaru has been using DCCD (Driver Controlled Center Differential) on its Impreza WRX STi since 1994, starting from the first WRX STi Type RA which was used as the basis of WRC car. This is a very sophisticated yet effective piece of engineering. It initially provided a normal torque split ratio of 35:65, or 41:59 since the 2005 revision. Moreover, the driver can adjust that to 50:50 in 6 fine steps by a switch on the center console. 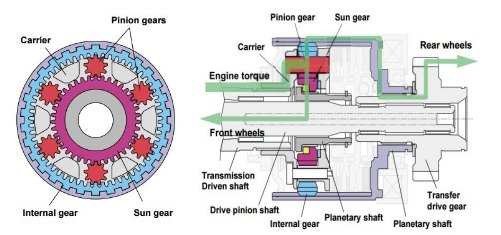  The DCCD consists of 3 main parts: a planetary center differential, a mechanical (clutch-type) LSD and an electromagnetic LSD. The planetary differential is responsible for splitting drive to front and rear axle. Torque from the engine goes through a hollow shaft to 6 pinion gears, which drive the sun gear and the surrounding internal gear simultaneously. Since the teeth ratio of sun gear to internal gear is 41:59, the torque split between them is also 41:59 (simple physics). The sun gear and internal gear connect to front and rear drive shaft respectively. Note that when running in straight, both drive shafts are turning at the same speed, thus all these parts spin together without relative movement. When the car turns into corner, the front wheels turn faster than the rear. As a result, the speed difference between sun gear and internal gear causes the pinion gears to rotate and tolerate such difference. In other words, it does the job of a normal differential. 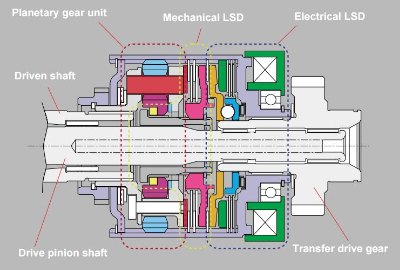 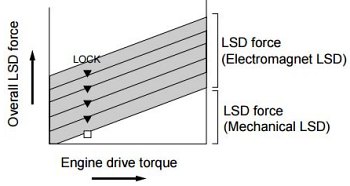 Now let's turn to the mechanical LSD. It is located behind the planetary differential. Itself consists of a few clutch plates, which are actuated by a torque cam mounted between sun gear and planetary shaft. The higher the engine torque output, the more the torque cam pushes the clutch plates together (note: the torque cam is not shown in these pictures but it is just a simple mechanical means). Since the mechanical LSD bridges between the front drive shaft and housing/rear drive shaft, its engagement and disengagement alter the degree of differential lock up. On the top of that, the electromagnetic LSD adds further lock up. By adjusting the current to its coils, the degree of clutch lock-up can be controlled, and this is how it implements the 6 driver controllable steps. When both LSDs work to maximum, the front and rear axles are completely locked up, thus the torque split should be 50:50. Of course, if one axle affords less traction, the other axle could get the majority of torque. The DCCD might be able to vary torque split ratio in normal driving, but the range is rather narrow, i.e. between 41:59 and 50:50. This makes the 6 steps of adjustment rather superfluous (they were actually more useful on the original design with 35:65 torque split). Moreover, as the mechanical LSD tends to lock up under throttle, the car biases towards understeer in corner. The electromagnetic LSD could have been made an active differential if it was strengthened and linked to ECU rather than only the driver controlled switch. As it is not, Subaru lost the opportunity to match Mitsubishi ACD. Haldex clutch - Volkswagen 4motion (1998)  The Haldex-clutch 4WD
system was developed by Swedish company Haldex Traction, which is now
owned by BorgWarner. It was first used by Audi TT and Volkswagen Golf
4motion in late 1998. It didn't take long to prove itself a cost
effective
and reliable system, so its usage was expanded to the whole Volkswagen
group (which used it to replace Syncro), and later on Volvo, Land
Rover, Ford etc. Today, it is easily the most popular kind of 4WD
system in the industry, taking over the position left by
viscous-coupling. The Haldex-clutch 4WD
system was developed by Swedish company Haldex Traction, which is now
owned by BorgWarner. It was first used by Audi TT and Volkswagen Golf
4motion in late 1998. It didn't take long to prove itself a cost
effective
and reliable system, so its usage was expanded to the whole Volkswagen
group (which used it to replace Syncro), and later on Volvo, Land
Rover, Ford etc. Today, it is easily the most popular kind of 4WD
system in the industry, taking over the position left by
viscous-coupling. The Haldex arrangement uses an electrohydraulic multi-plate clutch, typically mounted near the rear axle, to engage the rear axle when more traction is needed. The clutch discs are immersed in oil bath to reduce friction. Actuation is implemented by the hydraulic pressure, which is regulated by solenoid valves under the control of ECU. Normally the input and output shafts rotate at the same speed (unlike the case of PSK which introduced a small speed difference deliberately), so even when the clutch is engaged no torque will be sent to the rear axle. When wheel slip happens, speed difference is built up thus the clutch can transfer torque to the axle with more traction. The more the clutch engages, the more torque is transferred. If the front wheels are running with near zero traction, theoretically the rear axle could get 100 percent torque, but in the real world such conditions are unlikely to happen. 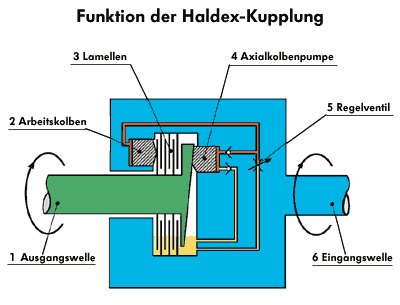 As seen, the Haldex system is basically a part-time 4WD. In normal running the car behaves just like FWD. Only when the surface get slippery or if the driver push the car too hard the rear axle will get into play. It is therefore more a choice for security rather than performance. Later generations of the system have a slight torque transfer to the rear, or 95:5 torque split ratio, in order to preload the system and quicken its response when slip occurs. The electrohydraulic system was further improved to speed up response, but the part-time nature is largely unchanged. On the plus side, this means the clutch is subjected to minimal wear, thus it could be made smaller and cheaper. Besides, the part-time nature results in less energy loss when 4WD is not in need. Both explain why the Haldex clutch could be so popular. Mitsubishi ACD - Mitsubishi Lancer Evo VII to X (2001) Until the mid-2000s, World Rally Championship was still based on production cars thus it developed many useful technologies for road cars. One of them was Mitsubishi's ACD Active Center Differential. It was introduced by Lancer Evo VII in 2001 and, when working in conjunction with the rear-mounted AYC (Active Yaw Control), delivered unrivalled handling and driving excitement. ACD normally distributes 50:50 torque front to rear, but it is able to tighten the differential with its electrohydraulic multi-plate clutch. When the car enters a corner, ACD tends to distribute equal amount of torque to both axles by locking up the clutch in order to maximize grip and induce a bit understeer - both of them are vital to stabilize the car. In mid-corner, it tends to disengage the clutch thus allows more speed difference between front and rear wheels, which is vital to cornering agility. In the exit phase it locks up again to equalize pulling force on all wheels, hence maximizes traction to pull the car out of corner. All these actions are controlled by computer according to needs, of course. 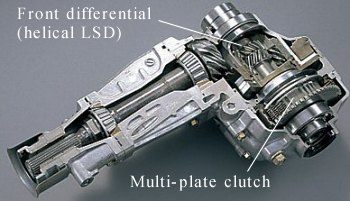 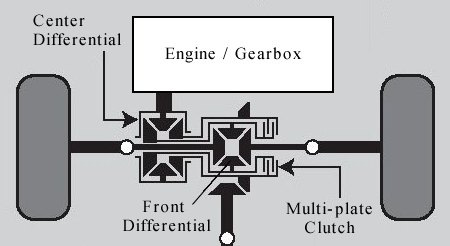 The ACD hardware is mounted at the front axle. As seen in the above pictures, it is quite a compact yet sophisticated unit. An open center differential receives power from the gearbox and splits that 50:50 (under normal condition) to 2 paths, one is the front differential (which is a helical LSD), another is the clutch housing, which links to the prop-shaft/rear axle. To save space, the front differential is incorporated inside the clutch housing. This also allows the multi-plate clutch to lock them up easily. By doing so, the front axle and rear axle turn at the same speed. Compared with mechanical LSDs like clutch-type LSD or Torsen LSD, ACD is smarter, of course. It can read the road and driving conditions to determine the timing and manitude of lock up, and it can do that smoothly to refine the handling. Furthermore, when working in conjunction with rear-axle AYC, it can use torque vectoring to induce the desired over- or understeer. This explains why the Lancer Evo VII to X could earn such a strong reputation in the 2000s. |
||
| Copyright© 1997-2016 by Mark Wan @ AutoZine |