|
AUTOZINE TECHNICAL SCHOOL
4-Wheel Drive Introduction
When it comes to traction, 4 wheels are definitely better than 2. Since the very beginning of automotive history, many engineers tried the idea of 4-wheel drive. However, successful applications had been limited to military and offroad use (e.g. Jeep and Land Rover) until 1967, when Jensen FF brought the Ferguson Formula system to the road car market. The first mass production cars came even later - the 1980 Audi Quattro and AMC Eagle, by then automobiles had been around for nearly a century! 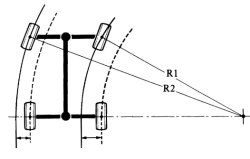 4WD is not just adding a
differential to the front axle and linking it to the rear axle. If so,
the front
and rear axles would have been spinning at the same rate all the time.
When a car turns into corner, the front wheels travel longer
distance thus turn faster than the rear wheels (see picture). If they
are forced to turn at the same speed, the wheels will fight with one
another, causing wheel spin, loss of traction, a lot of noise and tire
wear. Worse still, the handling will
become very unpredictable. 4WD is not just adding a
differential to the front axle and linking it to the rear axle. If so,
the front
and rear axles would have been spinning at the same rate all the time.
When a car turns into corner, the front wheels travel longer
distance thus turn faster than the rear wheels (see picture). If they
are forced to turn at the same speed, the wheels will fight with one
another, causing wheel spin, loss of traction, a lot of noise and tire
wear. Worse still, the handling will
become very unpredictable. To address this issue, obviously, we need to add a center differential at somewhere between the two axles. This allows the front and rear axles to turn at different speeds in corner. However, as in the case of RWD or FWD cars, an open differential could be counterproductive when one side loses traction. For example, if the front wheels slip, the differential will transfer more torque from the rear axle to the front axle, causing the latter to spin even faster. That's why the center differential needs to have anti-slip function. Therefore, center limited slip differential is the core of 4WD technology. In other words, whether a 4WD system performs well or not depends very much on what type of center LSD it employs. When the first Audi Quattro was developed, Audi could not find a suitable center LSD to serve the mass production purpose. Therefore, it employed an open center differential plus a driver-activated lock up (operated by a switch) to deal with embarrassing moments. Many 4x4 cars then were even simpler, using part-time 4WD systems with manual engagement. However, thanks to the effort of Group B world rally championship, 4WD technology progressed quickly in the mid-1980s. In 1987, Audi introduced Torsen center differential to the road-going Quattro. Since then 4WD finally became practical to use for every situation. 4WD with Mechanical-type torque split: Torsen Differential - e.g. Audi Quattro system Since the Ur Quattro adopted it in 1987, Torsen differential (now renamed to Torsen type A following the introduction of its variants type B and C) had been using on pretty much all quattro-equipped Audi models for the next 20 years (excluding the transverse-engined Audis derived from Volkswagen platform, of course). So to speak, it made quattro famous, vice versa. We have already seen how the Torsen LSD works in the section of Limited Slip Differential. If not, please study that section first. In short, Torsen differential uses the special combination of worm gears and worm wheels to enable speed difference beween the two axles, whereas in case of slip it locks up automatically. Since it is a pure mechanical design, there is virtually no delay in its response. 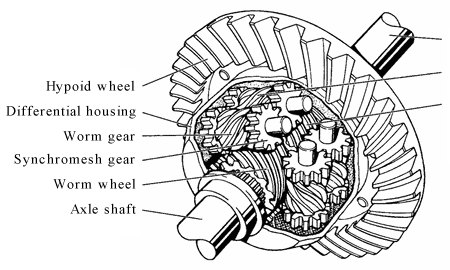 Running in normal
condition without tire slip, Torsen differential splits torque
50:50 front to rear, thus the quattro is a symmetric 4WD. On the Ur
Quattro, it had a torque bias
ratio (TBR) of 3:1, thus each axle could receive up to 75 percent of
toque when the other axle lost traction. This cannot match newer 4WD
systems with active differential, but the Torsen setup is simpler,
more reliable yet capable of handle quite a lot of power.
Torsen C One weakness of the original Torsen differential was its 50:50 torque distribution. It made the quattro cars notorious for understeer and dull handling (the Ur Quattro was the only exception perhaps). When JTEKT, the manufacturer of Torsen, developed a new variant with 40:60 torque split, Audi immediately adopted that on its 2005 RS4, followed by many other models. Meanwhile, Alfa Romeo also employed the Torsen C differential on its 156 Q4, 159 Q4 and Brera Q4. 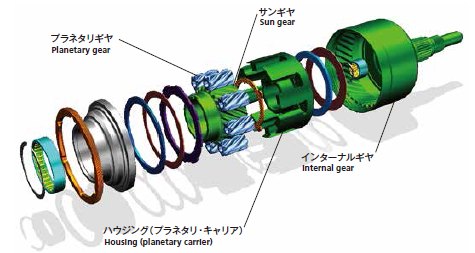 The Torsen C differential looks very
different in construction. It has the worm wheels and worm gears
arranged in planetary style. Power coming from the gearbox drives the
planetary gears, which in turn drive the sun gear (which connects to
the front axle) and the inner gear (which connects to the rear axle)
simultaneously. Thanks to its larger circumference, the inner gear has
more teeth than the sun gear. As result, the torque split is
proportional to the number of teeth, i.e. 40:60 front to rear.
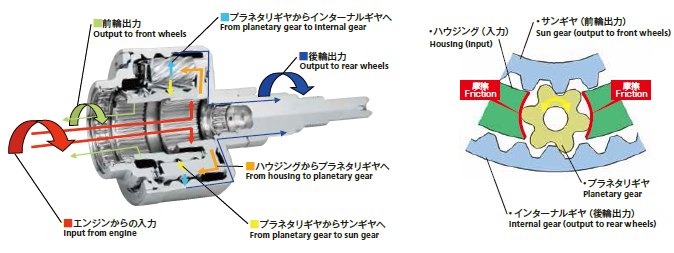 The limited slip function is just the same as the original Torsen differential. Here, the worm gears are the planetary gears, while worm wheels are the sun gear and inner gear. The Torsen C has a more desirable torque split under normal condition, but its torque bias ratio remains quite low. Crown Gear Differential - e.g. Audi RS5 Quattro Having been using Torsen center differential in its Quattro system for more than 20 years, Audi finally developed a new kind of center differential called "crown gear differential", which made its debut on RS5 Quattro in 2010. Like Torsen C differential, the crown gear differential is default to 40:60 torque split between front and rear axles under normal condition, so it is able to deliver a handling characteristic more akin to rear-drive cars, or in other words, to be less troubled by understeer. When the front axle loses traction, it may send up to 85% torque to the rear. When the rear slips, it transfers up to 70% torque to the front. Such locking range is much wider than the case of Torsen C differential, so it should deliver superior handling, especially when mated with torque-vectoring electronic rear differential as the rear axle now has more torque to play with. Moreover, the crown gear differential is simpler in construction and weighs 2 kg less than Torsen C. 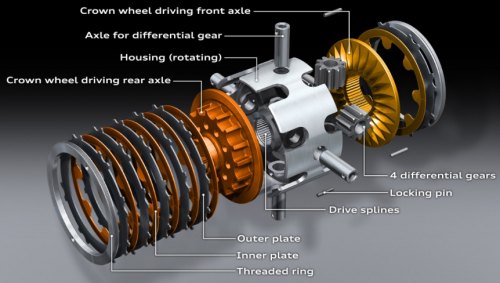 Let's see the construction of this
differential. Its core is a pair of disc-style crown gears (indicated
as "crown wheel" in the picture). The crown gears are so named because
they really look like crowns with their top-mounting teeth. One of them
is attached to the front drive shaft while another connects to the rear
drive shaft. They sandwhich 4 pinion gears ("differential gears" in
picture) whose shafts are mounted at the differential housing and the
hub of the differential. The hub is rigidly connected to the input
drive shaft, which gets power from the gearbox. To save space, the
input drive shaft goes through the hollow output drive shaft for the
front axle. At either sides of the crown gears, there are some friction
plates. Half of them connect to the adjacent crown gears and the
remaining connect to the differential housing. In short, the components
connected to the differential housing are colored grey in the above
picture. The components connected to the front drive shaft and rear
drive shaft are colored gold and bronze, respectively.
Now see how it operates. In normal condition where no tire slip occurs, the front and rear axles rotate at the same speed. The input drive shaft rotates together with the whole assembly, including the differential housing and all the internals. Since the 2 crown gears are moving at the same speed, the pinion gears remain stationary. When the car maneuvers, the front drive shaft spins slightly faster than the rear drive shaft, then the speed difference between crown gears will rotate the pinion gears. In other words, the pinion gears allow the speed difference between front and rear axles, thus it provides the function of a conventional differential. 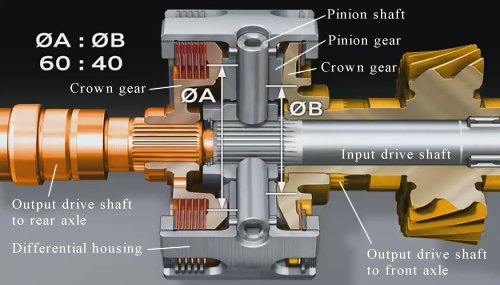 How does it achieve the 40:60 torque split under normal condition? Look at the above picture and you will find the pinion gears couple at different positions of the crown gears. The coupling radius (disance from the coupling point to the axle center) of the front crown gear is shorter than the one of the rear crown gear. The ratio between them is exactly 40:60. From simple physics, we know Torque = Force x Radius. In steady condition, the Force acted on both crown gears are equal (otherwise, the net force will spin and accelerate the pinion gear), so Torque is proportional to Radius, thus explain why the torque split is 40:60. More tricky is the limited-slip function. It is said that the teeth of crown gears are specially shaped such that, when the pinion gears spin, the tooth geometry* generates axial forces to push the crown gears outward. This causes the friction plates at either sides to compress, partially lock the crown gears to the differential housing. Since the axial forces are not strong enough to fully lock up the friction plates, the differential cannot transfer 100% torque to one axle, unlike the case of active or mechanical LSDs, but its transfer range of 15-70% for front wheels and 30-85% for rear wheels are already good enough to take care of most situations. In extreme cases where one axle loses almost all traction, Audi uses EDL electronic differential lock to brake the spinning wheels and transfer torque to other wheels. * Tooth geometry: the geometry takes some sophisticated engineering probably not even Audi can master. It was actually developed with the help of Swiss engineering firm ASSAG, which owns the patent of crown gear. Viscous Coupling - e.g. Volkswagen Syncro Viscous Coupling (VC) used to be widely used in many simple 4WD systems as it is cheap to build. It was employed by the 1980 AMC Eagle (one of the first 4WD mass production road cars), but more well-known in the name of Syncro, which served a lot of Volkswagen models from the late 1980s until the Haldex-clutch 4motion system taking over. It was also used by Lamborghini Diablo VT and Murcielago, Porsche 993 and 996, Volvo 850 AWD etc. as the simplest way to add 4WD. 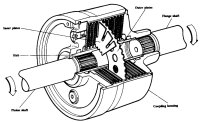  The construction of viscous coupler is very simple. Inside the differential case there are many circular plates positioned very close to each other. Half of them connect to the front drive shaft, while the remaining connect to the rear drive shaft. The sealed housing is fully filled with a fluid of high viscosity, which has a strong tendency to stick those plates together. In normal running condition, front and rear axles spin at the same speed, so the plates and viscous fluid rotate together without relative displacement. When tire slip occurs in one of the axles, the alternating plates turn at different speeds, thus the viscous fluid tries to stick them together. As a result, torque is transferred from the faster drive shaft through the fluid to the slower drive shaft. The greater the speed difference, the more torque it transfers to the slower drive shaft and the more it resists the faster driveshaft. In other words, it provides anti-slip function. Unlike Torsen differential, VC is speed-sensing rather than torque-sensing. This means its torque transfer is not limited by TBR (Torque Bias Ratio). If one axle is running on ice or even lifted in the air, it will transfer almost all torque to the other axle. On the downside, when there is no tire slip thus no speed difference between the axles, no torque is transferred to another axle. This means the Syncro system remained FWD in normal driving and only switched to 4WD when the road gets slippery. In other words, it was a part-time 4WD system. Another weakness is the delay in response. Since viscous fluid is a flexible medium, it does not react as fast as gears. Moreover, the relationship between torque transfer and speed difference is exponential. This means there is very little torque transfer at the initial stage of slip. To address this problem, most manufacturers adjust the final drive ratio such that a slight speed difference is introduced to pre-load the VC. As a result, the car runs with, say, 95:5 torque split under normal condition. This shortens the delay time, but it is still impossible to match Torsen differential. Moreover, the viscous oil has limited longevity. When it is done, the whole VC has to be replaced. Therefore, when Haldex-clutch setup arrived in the late 1990s, viscous-coupling 4WD began phasing out. Viscous-Coupling Differential Lock - e.g. Subaru Impreza WRX Many Group A rally specials in the 1990s employed this kind of center differential, such as Subaru Impreza WRX, Toyota Celica GT-Four, Mitsubishi Lancer Evo I to VI and Ford Escort RS Cosworth. It is basically an open differential added with a viscous coupling to provide anti-slip function. The differential normally offers 50:50 torque split. When slip occurs, the viscous coupling limits the speed difference while transferring more torque to the axle with better traction. Therefore, VCDL is a permanent 4WD system, but it shares some disadvantages of VC differential, such as slow response, non-linear torque transfer and longevity issues. 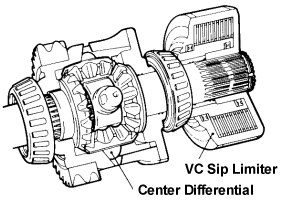 Some designs employed epicyclic (planetary) differential instead of conventional differential to enable a slight front or rear torque bias. Examples: Lancia Delta S4 (30:70) and Delta HF Integrale (56:44, later 47:53), Peugeot 205 T16 (33:67), Mitsubishi GTO (45:55) and Bugatti EB110 (27:73). Many viscous-coupling differential locks have already been replaced with more advanced active center differentials. However, for its simplicity and low cost, Subaru continues to use it on the regular WRX, whereas the hotter STi gets DCCD instead. |
||
| Copyright© 1997-2016 by Mark Wan @ AutoZine |